梯度下降在深度学习领域,它几乎是所有模型训练的基石。尽管它的思想已经深入人心,但我偶尔还是喜欢回到原点,用最简单的例子把这些基础概念重新审视一遍。
我们从一个最纯粹的问题开始:在二维平面上散布着一些数据点 ,我想用一条直线去拟合它们。

模型与目标
最简单的直线模型,形式如下:
这里的 和 就是我们要通过学习来确定的参数。对于一个给定的真实数据点 ,模型会给出一个预测值 。为了衡量预测得好不好,我们需要一个损失函数(Loss Function)。一个最自然、也最常用的选择就是均方误差,这里为了让推导过程尽可能地简洁,我们先只考察单个样本点带来的损失:
这个式子的含义非常直观:预测值 与真实值 的差距越小,损失 就越小,也就意味着我们的直线拟合得越好。我们的最终目标,便是找到一组参数 ,使得在整个数据集上的总损失最小。
梯度计算
梯度下降的核心在于“下降”二字,而“梯度”则为我们指明了方向。为了让损失 下降,我需要知道参数该朝着哪个方向调整。这在数学上,就是计算损失函数 关于两个参数 和 的偏导数。这只是一个简单的复合函数求导,根据链式法则,整个过程并不复杂。
首先,我们来计算损失 对权重 的偏导数:
接着,是损失对偏置 的偏导数:
这样一来,我就得到了损失函数 在参数空间 中的梯度向量 :
在数学上,梯度向量指向的是函数值上升最快的方向。而我们的目标是让损失减小,所以很自然地,我们应该沿着梯度的反方向去更新参数。
“下山”的直觉
我喜欢把这个优化过程想象成一个三维的场景。我们可以把参数 和 看作是一个二维平面上的两个坐标轴,而损失函数 的值则是这个平面上方的高度。这样就构成了一个三维的、通常是碗状的曲面。
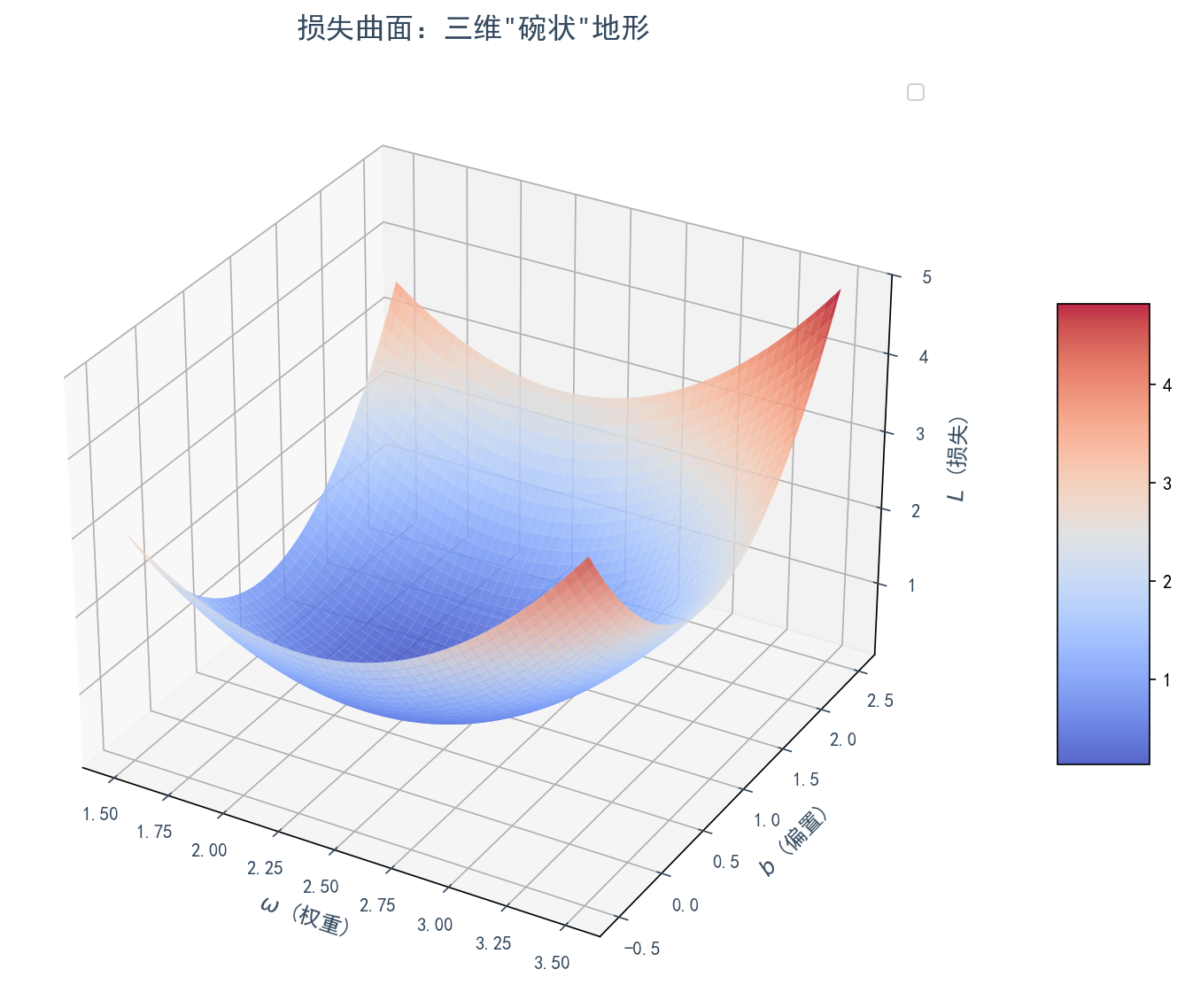 我们的任务,就像是站在这个曲面的某个随机的山坡上,想要走到山谷的最低点。梯度 指向的是上山最陡峭的方向。那么,要下山,我只需要朝着它的反方向 迈出一步即可。
我们的任务,就像是站在这个曲面的某个随机的山坡上,想要走到山谷的最低点。梯度 指向的是上山最陡峭的方向。那么,要下山,我只需要朝着它的反方向 迈出一步即可。
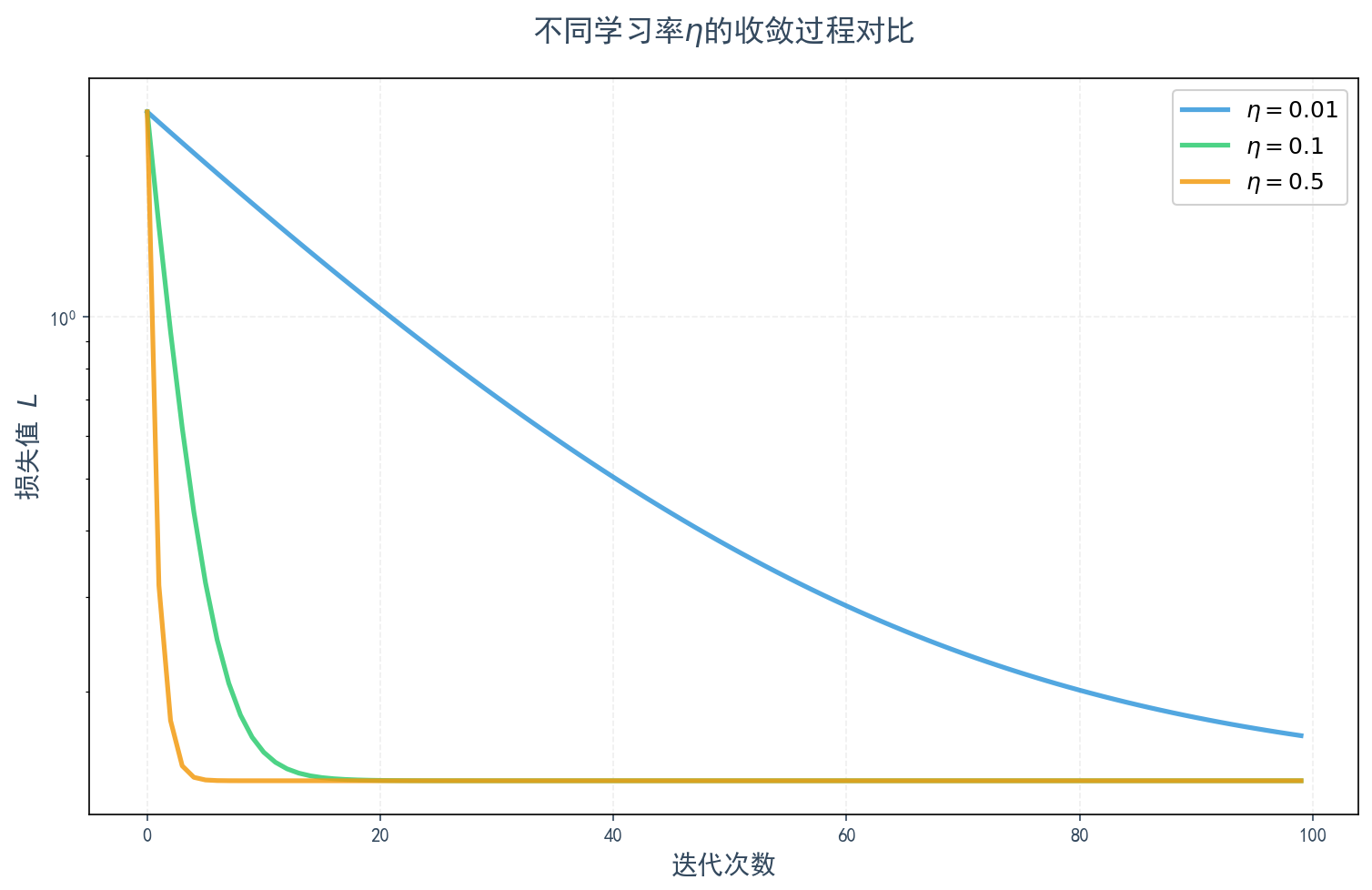
假设我设定一个步长,在机器学习中我们称之为学习率(Learning Rate),记作 。那么每一步的参数更新规则就可以写出来了:
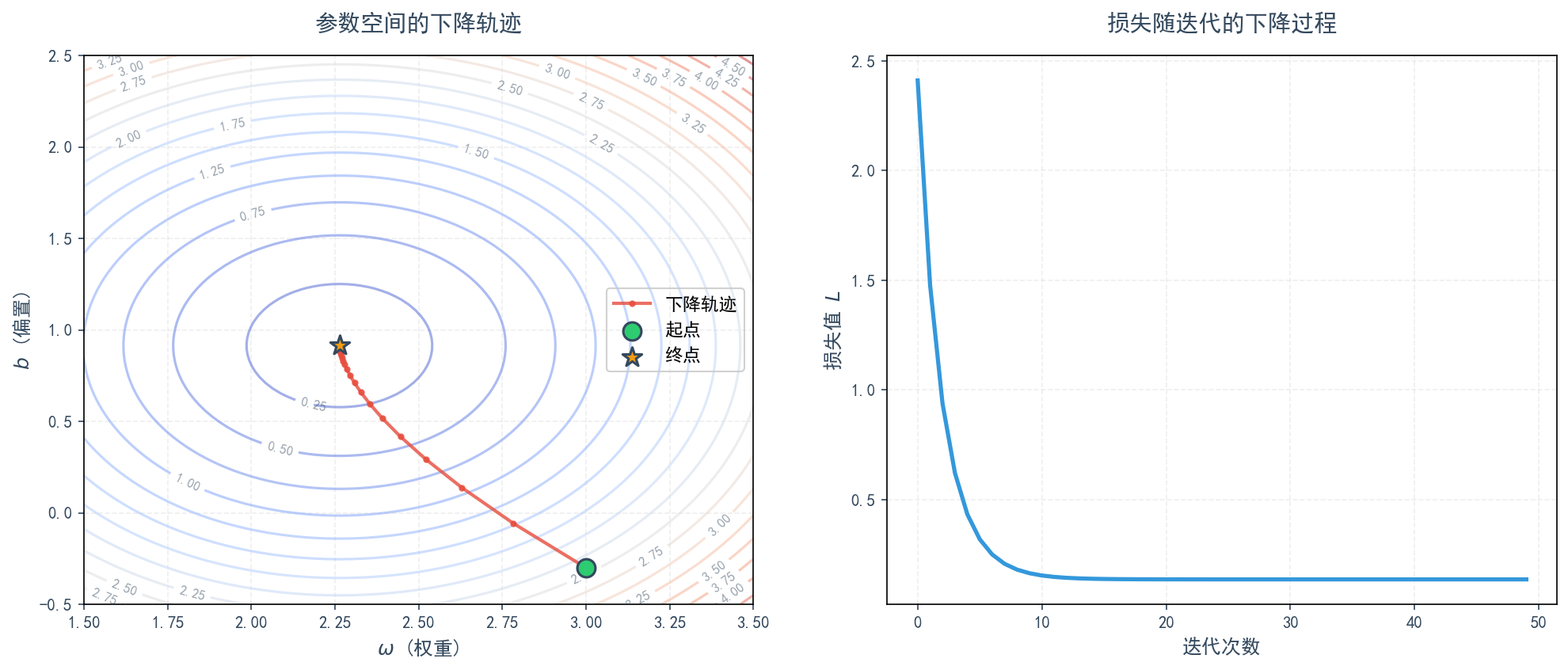
这里值得注意的是,我们上述的梯度计算,仅仅是基于一个随机抽取的样本点 得出的。每拿到一个样本,就计算一次梯度并更新一次参数,这个过程就是随机梯度下降(Stochastic Gradient Descent, SGD)。从随机近似(Stochastic Approximation)的理论来看,尽管每一步的更新方向都带有一定的随机性和“噪声”,但只要学习率 设置得当,这一系列看似杂乱的步伐,总体上是朝着让总损失减小的方向前进的,最终能够引导我们走到那个理想的“谷底”附近。
 从这个最简单的例子中,我们能清晰地看到梯度下降的本质:通过计算梯度来寻找下降方向,并以小步迭代的方式逐步逼近最优解。无论是多么复杂的神经网络,其训练的核心思想,也无外乎是这个朴素过程的延伸和拓展。
从这个最简单的例子中,我们能清晰地看到梯度下降的本质:通过计算梯度来寻找下降方向,并以小步迭代的方式逐步逼近最优解。无论是多么复杂的神经网络,其训练的核心思想,也无外乎是这个朴素过程的延伸和拓展。
x的角色
写到这里,我突然冒出一个问题。在那个 的三维空间里,我们一直在讨论参数 和 这两个坐标轴,以及损失 这个高度。那么,我们的数据 到底扮演了什么角色?它也是一个坐标轴吗?
仔细一想,并非如此。(以及它的搭档 )并不是这个空间的坐标,相反,它们是这个空间“地形”的塑造者。
我们可以这样来理解:
-
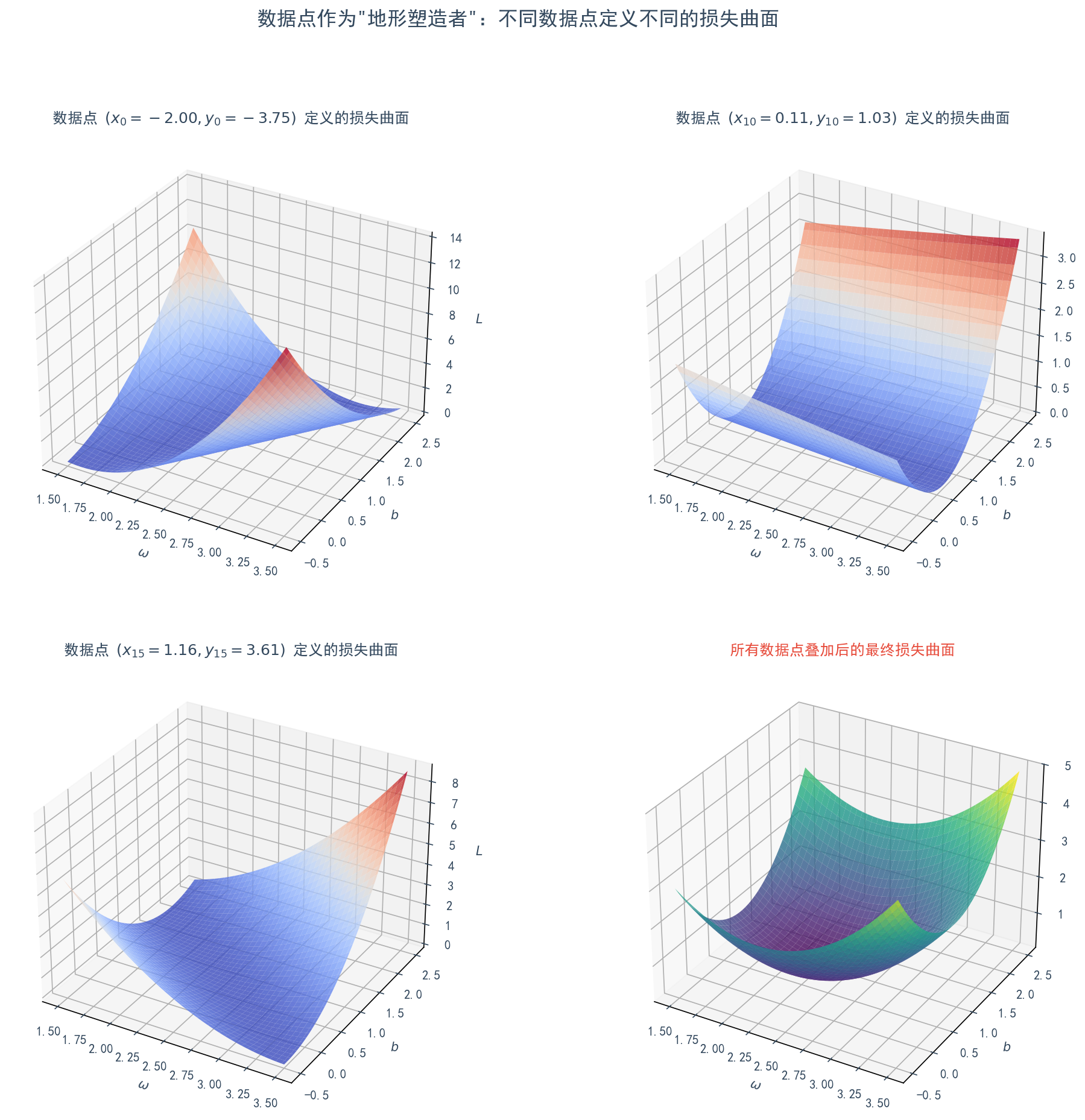
单个数据点的作用:假设我们的数据集只有一个点 。这个点本身就定义了一个完整的三维“碗状”曲面。你任意选定一组 ,就可以根据公式 计算出唯一的损失值 。在这个计算中, 和 是固定的常数,所以它们共同决定了这个“碗”的形状、位置和最低点。
-
不同数据点,不同地形:现在,我们换一个数据点 。它会定义出另一个不同的“碗”。也许这个碗更陡峭,或者碗底在 平面上的位置不同。
-
整个数据集的作用:我们整个训练任务所面对的最终损失曲面,实际上是数据集中所有点所定义的“碗”的叠加或平均。每一个数据点 都贡献了它自己的地形特征,所有这些特征融合在一起,形成了我们最终需要下降的那个复杂而唯一的山谷。
这个想法可以从我们刚刚推导的梯度公式中得到印证: 。
直接出现在了 的梯度公式里。这意味着:
x决定了在w方向上的坡度:当一个数据点的 很大时,它计算出的 也会相应变大(在误差项不为零的情况下)。这意味着这个数据点对 的更新会施加更大的“拉力”,它在塑造损失曲面时的话语权更重,使得在那个点的局部地形在 方向上更“陡峭”。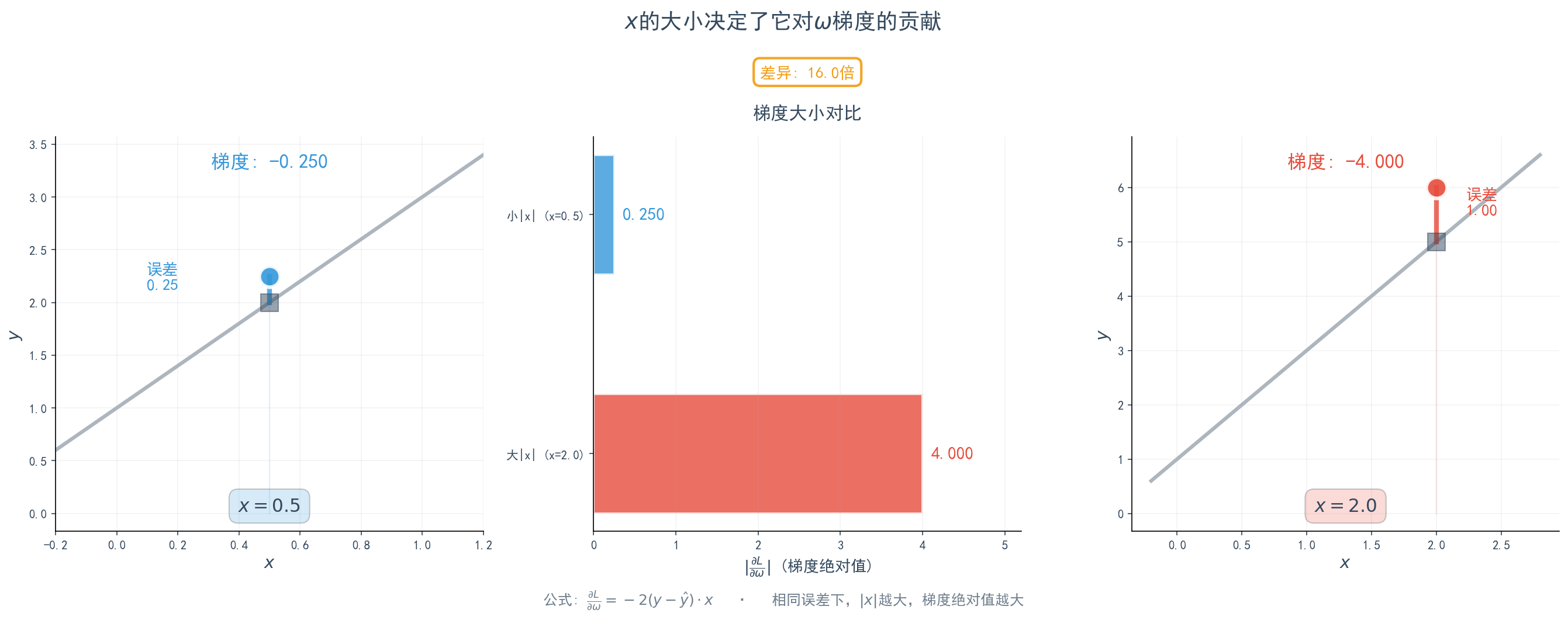
- 如果某个数据点的 ,那么它对 的梯度就为 0。这意味着这个点完全无法告诉我们应该如何调整斜率 。这跟我们的直觉是相符的——一个在y轴上的点,无论直线斜率怎么变,只要截距 合适,直线都能穿过它。
所以,在 的三维空间中, 不是一个维度,而是定义这个空间“地形”的关键常数。数据集里的每一个 (和 )都像一个引力源,共同塑造了最终的损失曲面,而梯度下降算法就是在这个被 和 塑造好的地形上寻找最低点的过程。
再进一步:关于“噪声”的思考
我们刚才提到,最终的损失曲面是所有数据点定义的“碗”的叠加或平均。这里就引出了一个更深刻的问题:我们为什么要进行叠加或平均?如果每个数据点 都代表了一个“真相”,那它们定义的地形为什么会不一样呢?这背后其实就牵涉到我们如何看待“噪声”。
在建模的语境下,“噪声”通常指数据中不能被你当前选定模型所解释的部分。它可能来源于测量误差,也可能源于系统内在的随机性,或者——这是最关键的一点——来源于模型本身的局限性。当你试图用一个简单的线性模型 y = wx + b 去拟合一个本质上更复杂的现实关系时,那些模型无法捕捉到的真实结构,在模型看来,就表现为了“噪声”或“误差”。
我们之所以要对所有数据点的损失进行平均,正是为了找到一个能在所有这些带有“噪声”的、不完全一致的“地形”之间取得最佳平衡的模型。我们希望模型能学习到数据背后那个普遍的、可泛化的“信号”,而不是被单个数据点独特的“噪声”所绑架。后者正是我们常说的“过拟合”。
这个问题再往下想,就触及了建模的哲学边界。我们观察到的数据,究竟是一个确定性世界因为我们信息不完备而产生的“表观随机”,还是说,“可能性”和“随机性”本身就是世界的底层逻辑?
这背后是两种世界观的碰撞:
-
经典决定论(拉普拉斯妖):这个观点认为,现实世界在根本上是确定性的。每一个事件都由其之前的原因严格决定。我们之所以需要“概率”和“噪声”,完全是因为我们信息不完备。所谓的“噪声”,本质上都是未被我们建模的、更精细的“信号”。如果有一个“拉普拉斯妖”能知道宇宙中所有粒子的状态和所有作用力,那么一切都是可以被完美预测的,“噪声”将不复存在。
-
内禀随机性(量子力学):这个观点则认为,宇宙的底层逻辑是概率性的。比如,一个放射性原子何时衰变是内禀随机的,我们无法用任何“隐藏变量”来精确预测,只能给出一个概率。在这个世界观里,即使是“拉普拉斯妖”,也无法精确预测一切。噪声中,至少有一部分是不可约减的、源于世界本源的随机性。
作为一个从事算法工作的人,我的感受是,在实践层面,我们通常采取一种实用的决定论立场。我们假定我们处理的宏观系统在很大程度上是因果决定的,我们的任务就是尽可能地用更强大的模型、更丰富的数据去逼近这个因果关系,将更多的“噪声”转化为可解释的“信号”。
但同时我们也要保持谦卑,承认我们的模型永远只是对现实的一种抽象和简化,并且宇宙的本源可能就存在着不可预测的随机性。一个好的模型,其价值不在于成为现实本身,而在于它强大的解释和预测能力,它恰恰懂得应该“忽略”掉哪些信息。